«Сформируйте морскую звезду», — командует ученый, направляя команду 1024 миниатюрным роботам посредством инфракрасного света. Роботы начинают подмигивать, а затем постепенно выстраиваются в пятиконечную звезду. «Теперь образуйте букву К». В Гарварде все же достроили свою армию роботов.

«К» — означает Kilobots, или «килоботы» — название этих чрезвычайно простых роботов, каждый из которых буквально в несколько сантиметров в поперечнике, танцующие на небольших треножках. Вместо того чтобы быть одним большим и сложным роботом, «кило» роботов работает совместно, представляя простую платформу для воплощения сложных форм поведения.
Так же как триллионы отдельных клеток можно собрать в разумный организм, килоботы демонстрируют, как сложность может возникать из самых простых механизмов поведения, выполняемых в массовом порядке. Для компьютерных ученых они также представляют собой важную веху в развитии коллективного искусственного интеллекта.

Этот самоорганизующийся рой был создан в лаборатории Радики Нагпаль в Гарвардской школе инженерных и прикладных наук (SEAS). Подробное описание работы было опубликовано 15 августа в журнале Science.
«Красота биологических систем в том, что они элегантны и просты — и все же в больших масштабах кажутся невозможными, — говорит Нагпаль. — На определенном уровне вы уже не видите индивидуум; вы просто видите коллектив как отдельный субъект самого себя».
Биологические коллективы вовлекают огромное число сотрудничающих лиц — будь то клетки, насекомые или животные — которые вместе выполняют определенную задачу. Так говорит Майкл Рубинштейн, научный сотрудник SEAS.
Он приводит в пример поведение колонии бродячих муравьев. Будучи связанными вместе, они могут образовывать плоты и мосты, чтобы пересечь сложный рельеф на местности. Социальные амебы делают нечто подобное в микроскопическом масштабе: когда пищи не хватает, они объединяются, чтобы создать плодовое тело, способное сбежать из определенной окружающей среды.
«Мы особенно вдохновляемся системами, где люди могут собираться вместе, чтобы решать проблемы», — говорит Нагпаль. Ее исследовательская группа попала в новости в феврале 2014 года вместе с группой роботов, похожих на термитов, которые могут совместно выполнять строительные задачи, используя простые формы координации.
Но алгоритм, который инструктирует этих роботов TERMES, еще не был продемонстрирован на примере огромного роя. На самом деле, не так много роботов на сегодняшний день превысили число в 100 индивидуумов, поскольку существуют определенные алгоритмические ограничения в координации такого огромного количества роботов.
Исследовательская группа Нагпаль преодолела все препятствия путем продуманной конструкции.
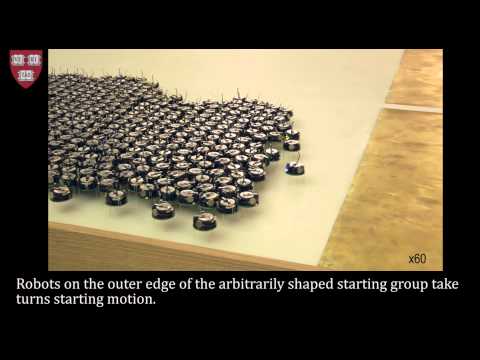
В частности, килоботы не требуют микроменеджмента или вмешательства после того, как был доставлен первоначальный набор инструкций. Четыре робота определяют происхождение системы координат, а остальные роботы получают двумерное изображение, которое нужно имитировать. Затем, используя крайне примитивное поведение — отслеживая расстояния от начала координат, сохраняя чувство относительного расположения и следуя за краем группы — они поочередно продвигаются к нужной позиции.
Группа ученых продемонстрировала математическое доказательство того, что индивидуальное поведение приводит к нужному общему результату.
Килоботы также исправляют свои собственные ошибки. Если поток трафика роботов сбивается с курса — ошибка, которая распространена на примере больших групп — ближайшие роботы определяют проблему и совместно исправляют ее.

В целях снижения стоимости килоботов, каждому роботу подарили два вибрирующих двигателя, которые позволяют ему скользить по поверхности на жестких ногах. Инфракрасный передатчик и приемник позволяют ему общаться с соседями и определять их близость — но роботы недальновидны и не обладают обзором с высоты птичьего полета.
Эти конструкторские решения пришли в виде компромиссов, говорит Рубинштейн:
«Эти роботы намного проще обычных роботов, поэтому их способности более разнообразны и менее надежны. К примеру, у килоботов есть проблема передвижения по прямой линии, а точность оценки дистанции варьируется от робота к роботу».
Тем не менее в масштабах интеллектуальный алгоритм преодолевает эти индивидуальные ограничения и гарантирует — как физически, так и математически — что роботы могут завершить определенную человеком задачу, в данном случае — составить определенную фигуру. Это важная демонстрация будущего распределенной робототехники.
«Все чаще мы хотим видеть, как большая группа роботов работает вместе, будь то сто роботов, которые должны будут устранить последствия экологического загрязнения, или миллионы автономных автомобилей, которые будут ездить по нашим дорогам. Понимание того, как спроектировать действительно хорошие системы в таком масштабе, будет иметь решающее значение», — говорит Нагпаль.
В настоящее время килоботы обеспечивают шикарную платформу для испытания алгоритмов искусственного поведения.
«Мы можем имитировать поведение большого роя роботов, но имитация всегда будет ошибаться, — говорит она. — В реальном мире динамика — физическое взаимодействие и изменчивость — будет совершенно другой, поэтому то, как килоботы позволяют протестировать алгоритмы поведения настоящих роботов, поможет нам распознать и предотвратить ошибки, которые могут случиться на крупных масштабах».




Новости, статьи и анонсы публикаций
Чат с читателямиСвободное общение и обсуждение материалов